- 1081
- 产品价格:面议
- 发货地址:上海奉贤 包装说明:不限
- 产品数量:9999.00 套产品规格:不限
- 信息编号:234701711公司编号:13707634
- 叶真华 微信 158003598..
- 进入店铺 在线咨询 QQ咨询 在线询价
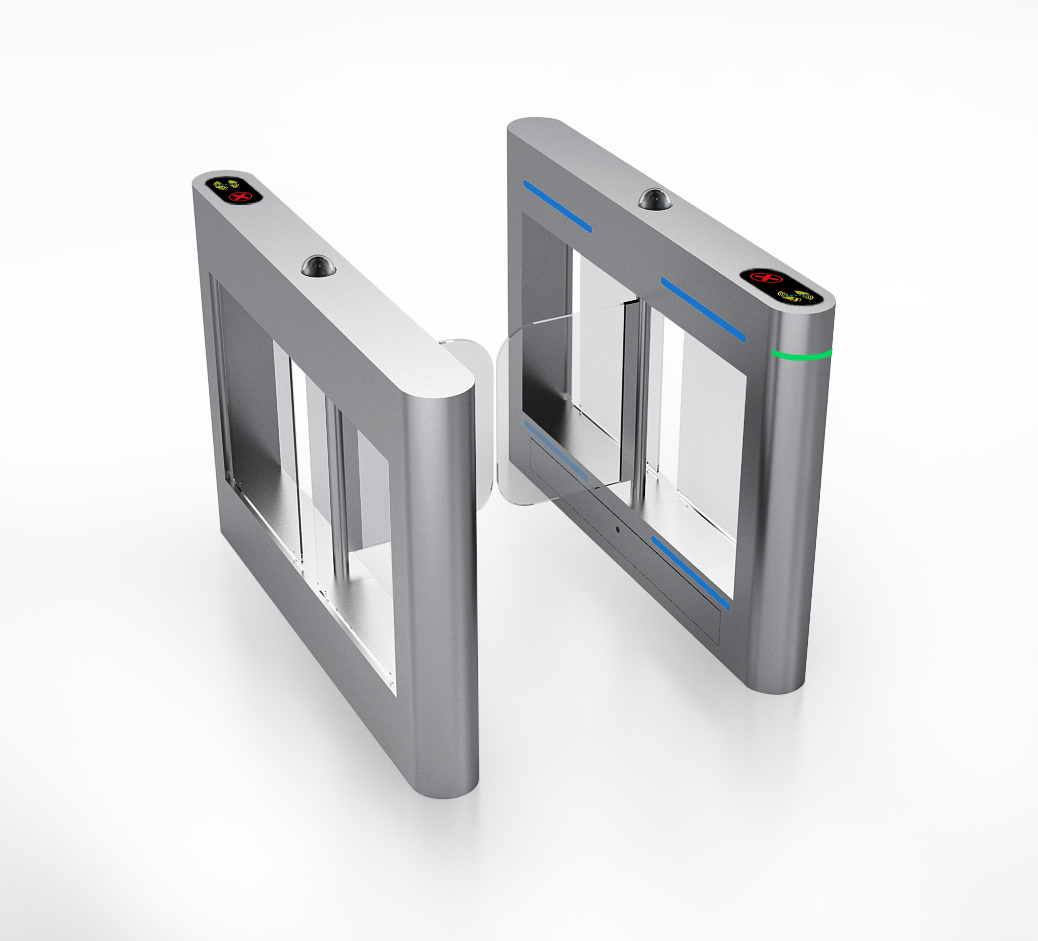
门禁闸机 上海市浦东新区智能摆闸系统定做 欢迎来电咨询
- 相关产品:
注意事项:
1.烧录程序,用跳线帽短接摆闸控制板J2,连接上串口通讯线,用ISP烧录软件即可将程序写入主芯片,如果程序在烧录过程意外中断而多次烧录失败,尝试单用5V电源烧录。
2.烧录完程序后,拔掉跳线帽,按下复位键,控制板运行程序后,摆闸必须通过串口软件设置初始速度值和角度值。
3..控制板上电时,不可直接插拔电源板24V直流电上电,正确的上步骤是:在电源板无输出电压的时候,即220V交流电关闭的时候,插好摆闸控制上的所有连接线,(传感器连接线,电磁铁,
电机连接线等),后直接通过220V交流闸上电,摆闸控制板就上电了。关闭闸机的时候也不要直接拔掉电源板24V插头。
4.设置好摆闸的初始角度和速度值后,如果是双摆闸应该在调试好单边的摆闸后,两台摆闸再进行联机工作模式调试,如果两台闸机的速度有明显差异,可以在利用调试软件适当调整摆闸的速度等
参数,尽量达到同步运行的效果。
5.摆闸的角度和速度值等设置好以后,测试摆闸电机转向有无错误:A向开门,摆闸主机开门应是逆时针方向旋转,说明电机转向正确,否则请将电机插座端子方向对调。
施工
我司免费为需方的通道闸工程项目上提供整体方案设计和产品説明书,需方负责项目工程现场施工或技术工作,若需方在技术上无法完成,我司提供现场工程和技术培训(费用经双方协商后决定).
本系统调试开通后,我司免费为需方提供相关操作、管理人员的培训资料,由需方组织相关终使用者培训,培训地点由需方和终使用者协商。
智能摆闸机械系统分为机箱和机芯两部分。机箱作为载体,其上安装有方向指示器、读写装置、红外线传感器等;机芯组成主要有电机、机架、传动轴、闸门等;
技术参数:
摆臂规格: 标准摆臂 600MM(可适当加长或缩短)
摆臂传动角度:180 度
摆动方向: 单向或双向
机箱材料: 标准 304 号不锈钢或定制316号不锈钢
电源电压: AC220±10% V,50HZ
驱动电机: 直流无刷电机 140W/24V(或有刷电机)
电机转速: 1600 转/分(标准)
输入接口: 继电器开关信号或 12V电平信号或脉宽>100ms 的 12V脉冲信号,
驱动电流>1 0 m A
通信接口: RS485 标准
通信距离: 1200 米
LED指示灯: 2个或者4个
读 卡 窗: 2 个
通行速度: 40 人/分钟(常开) ,25-30 人/分钟(常闭)
闸门开、关时间: 1-2秒
上电后进入通行状态所需时间: 3秒
出现故障后的自动复位时间: 10秒
工作环境:室内、室外
温 度:-40℃——80 ℃
湿 度:5%—— 90%
联系电话是021-52829500, 主要经营上海金赀智能科技有限公司是一家致力于车牌识别系统、道闸、工地实名制考勤系统、人脸识别系统、人行通道闸机、“三辊闸门禁系统平台研发、生产、销售及服务为一体的解决方案运营商。企业目标:致力于成为中国良好、良好的智能化通道系统专业服务商。。
单位注册资金单位注册资金人民币 100 万元以下。
{kind=link}