- 2024-04-18 09:01 2422
- 产品价格:面议
- 发货地址:江苏苏州吴中区 包装说明:不限
- 产品数量:9999.00 个产品规格:不限
- 信息编号:99478245公司编号:14462348
- 孙君 经理 微信 139140500..
- 进入店铺 在线咨询 QQ咨询 在线询价
嘉兴反向寻车系统厂家
- 相关产品:
嘉兴反向寻车系统厂家
反向寻车系统流程以某公司的寻车解决方案为例。整个系统采用TCP/IP的组网模式,签停机与签停机之间、签停机与查询机之间均采用TCP/IP通讯,签停机也具备查询功能。
寻车系统三种技术
车牌识别技术
基于计算机视觉技术,利用前端摄影机实时回传视频图像,获得车辆的车牌号码信息,进行车辆定位。
刷卡定位技术
利用分布于停车场各个区域的刷卡定位终端,进行刷卡定位。定位精度更高,可靠性高。
取票定位技术
在停车场各个区域的条码出票机上取条码票,票上打印中文车辆位置信息。取车时在液晶查询终端读取此票。
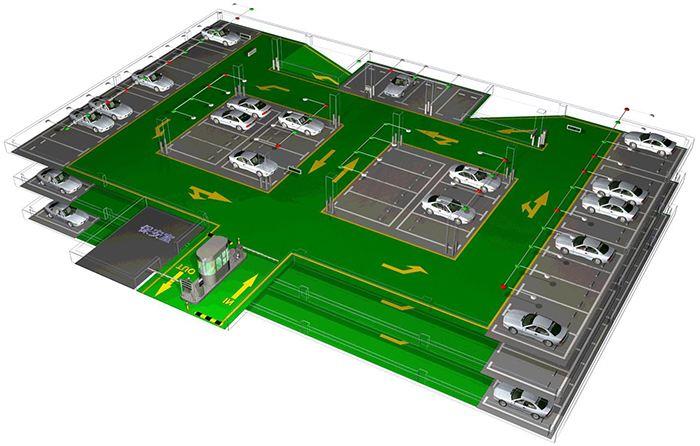
在大型的公共停车场内,由于停车场的空间比较大,车主往返所需要的时间比较长,环境及指示标志、诱导牌分布不合理等原因不易辨别方向,*在停车场内迷失方向,寻找不到自己的车辆。
智能寻车系统就是通过在每个停车位上装探头及超声波探测器、利用车牌识别系统对停车位的图像信息进行抓拍,视频监控终端将抓拍的图像通过网络传输给视频处理器进行车辆车牌的识别,其中就利用了图像流技术。通过网络交换机或类似功能设备将车位状态和识别的车牌号、停车时间、停放位置等信息,反馈到*处理机(中控机),并将信息自动存储数据库统一管理。
*处理机在接收视频终端的发送的信息数据进行处理后,通过交换机设备将信息发送到停车场内的LED屏,及时更新指令及车位信息,车主可以LED屏幕获知整个停车场各区域的车位情况,从而实现车位引导功能。
联系电话是0512-68550522, 主要经营仁为智控科技(苏州)有限公司是家专门从事智能化系统设备研发、车牌识别收费系统、人行通道闸、立体车库设备等产品。
单位注册资金单位注册资金人民币 100 万元以下。
{kind=link}